













| 船体尺寸 | 1800mm×1100mm×750mm(长*宽*高) |
|---|---|
| 船体动力类型 | 双引擎直流无刷电机马达 |
| 测深量程 | 0.3~100m(可选配更大量程) |
| 产地 | 中国 |
| 品牌 | 楚航 |
| 型号 | 冲浪者 |

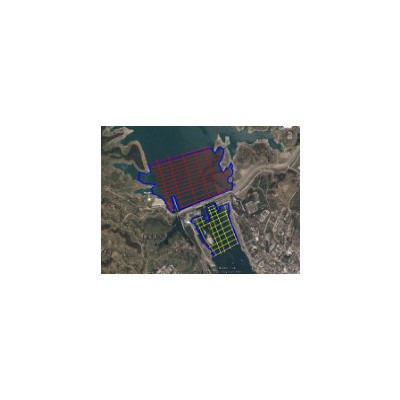
无人船水域测量机器人系统是以无人船为载体,集成自动舵技术、远距离无线通讯技术、多传感器集成与数据融合技术等多种先进技术,根据不同的测量要求在其上自由搭载GNSS接收机、三轴陀螺、测深仪等多种高精度传感设备,以2.4/5.8G无线通讯作为实时数据传输方式,以兼容多种不同类型、不同品牌的船载控制系统作为无人船核心,以手动或者自动的方式,实现测区内水下地形、流速流量以及水质等信息的实时自动获取。
系统采用锂电池供电,不存在任何漏油、排烟等污染环境的风险,可广泛应用于常规测绘、水利水电、航道、环保和灾害应急等行业及其他相关部门。
稳定性好、抗风浪能力强的船体设计
稳定性及抗风浪能力是数据有效性、数据安全、船只安全和设备安全的保障。本系统设计并采用了了一种双浮筒式的浮力共计和姿态稳定技术,大幅提高了无人船的搭载能力,与此同时极大的提高的船体在运行时姿态,特别是横滚方向的稳定性。从而保证的无人船在进行地形测量、流速流量测量、水质监测时所采集数据的真实性、有效性。
无舵自动走航技术
无人船采用自动舵技术,借助螺旋桨的推力和两个螺旋桨的速度差来实时调节航速和航向,实现自动按照预先设定的计划的航线进行正确的走线、换线及回归等功能。自动控制系统的性能直接影响着无人船航行的操纵性、经济性和安全性。自动控制系统总结了人的操舵规律,采用自动舵技术,在测量中自动控制无人船的航向,使得无人船准确的沿预定的航向运行,它能克服各种干扰的影响,使无人船自动地、稳定地和准确的沿预定的航向运行,是实现无人船自动作业和自动回归的核心技术。
多传感器集成与信息融合技术
本系统设计根据客户需求自由搭载多种GNSS接收机、测深仪等传感器,也可定制搭载ADCP、水质采样与在线监测设备等水文、水质测量设备,可搭载的传感设备繁多,在船载控制系统设计与程序编制中,采用多传感集成与信息融合技术,对各个传感器的数据传输协议、接口、传输时间延迟等作通用性的考虑与设计,实现多种传感器信息的集成与数据交换,从而满足不同类型的用户的测量要求。