
类别:双点组合
售后服务:3天退换
起订:20台
供应:1000台
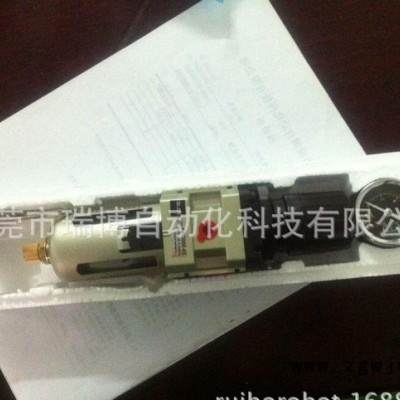
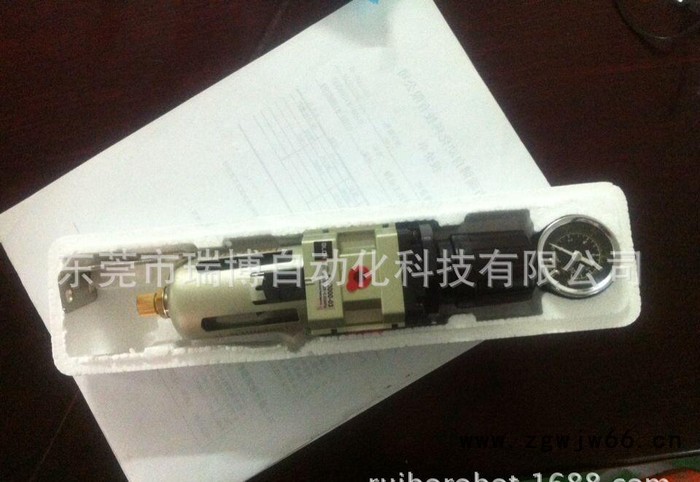
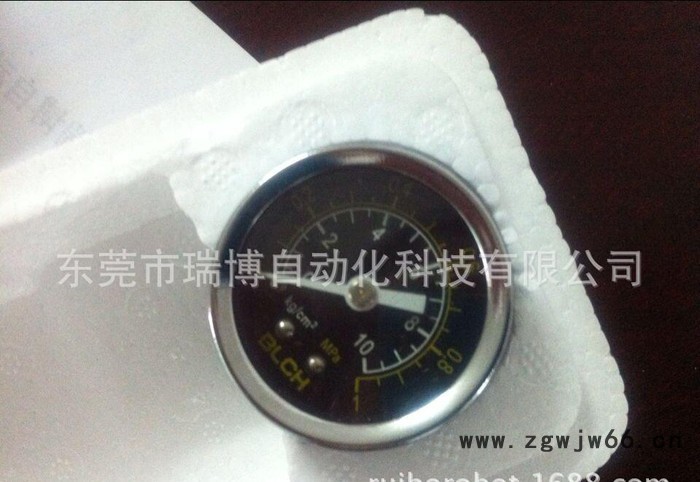
| 类别 | 双点组合 |
|---|---|
| 售后服务 | 3天退换 |
| 规格 | 机械手过滤器 |
| 品牌 | 瑞博 |
| 型号 | 大 |







执行机构
机械手的执行机构分为手部、手臂、躯干;1、手部手部安装在手臂的前端。手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的**多。可根据夹持对象的形状和大小配备多种形状和大小的夹头以适应操作的需要。所谓没有手指的手部,一般都是指真空吸盘或磁性吸盘。2、手臂手臂的作用是引导手指准确地抓住工件,并运送到所需的位置上。为了使机械手能够正确地工作,手臂的3个自由度都要**地定位。3、躯干躯干是安装手臂、动力源和各种执行机构的支架。驱动机构机械手所用的驱动机构主要有4种:液压驱动、气压驱动、电气驱动和机械驱动。其中以液压驱动、气压驱动用得**多。1、液压驱动式液压驱动式机械手通常由液动机(各种油缸、油马达)、伺服阀、油泵、油箱等组成驱动系统,由驱动机械手执行机构进行工作。通常它的具有很大的抓举能力(高达几百千克以上),其特点是结构紧凑、动作平稳、耐冲击、耐震动、防爆性好,但液压元件要求有较高的制造精度和密封性能,否则漏油将污染环境。2、气压驱动式其驱动系统通常由气缸、气阀、气罐和空压机组成,其特点是气源方便、动作迅速、结构简单、造价较低、维修方便。但难以进行速度控制,气压不可太高,故抓举能力较低。3、电气驱动式电力驱动是机械手使用得**多的一种驱动方式。其特点是电源方便,响应快,驱动力较大(关节型的持重已达400kg),信号检测、传动、处理方便,并可采用多种灵活的控制方案。驱动电机一般采用步进电机,直流伺服电机(AC)为主要的驱动方式。由于电机速度高,通常须采用减速机构(如谐波传动、RV摆线针轮传动、齿轮传动、螺旋传动和多杆机构等)。有些机械手已开始采用无减速机构的大转矩、低转速电机进行直接驱动(DD)这既可使机构简化,又可提高控制精度。4、机械驱动式机械驱动只用于动作固定的场合。一般用凸轮连杆机构来实现规定的动作。其特点是动作确实可靠,工作速度高,成本低,但不易于调整。






东莞市瑞博自动化科技有限公司座落于东莞市东坑镇,专业从事生产注塑机专用机械手臂及周边自动化设备,是一家集产品设计开发,生产制造,销售服务为一体的综合性企业:在塑胶业界有丰富的自动化规划与实战经验。
产品广泛用于家电业、电脑及周边行业、光电业、化妆品业、电子通讯业、汽车产业、玩具业、日用品业、医疗用品业等。基于未来注塑成型工艺的不断提升与发展,自动化是一个必然的趋势,瑞博公司采用互动共享直销模式,不断推介新产品,新技术,使您足不出户**可查询并购买到满意适用的产品节约您的采购费用,降低您的运营 成本。
瑞博公司以“专业,诚信,感恩”的企业理念来更好的服务客户,瑞博公司将继续专注于满足客户需求,为塑胶业界提供高品质,高效率,性能卓越的自动化产品,提升业界的生产效率与品质,提供完善的产品及周到的服务。

联 系 人 :刘剑
联系电话:13794982536
固定电话:0769-81179626
网 址://ruiborobot./